In collaboration between

Research Funding by

SoftAR: Visually Manipulating Haptic Softness Perception in Spatial Augmented Reality
Abstract
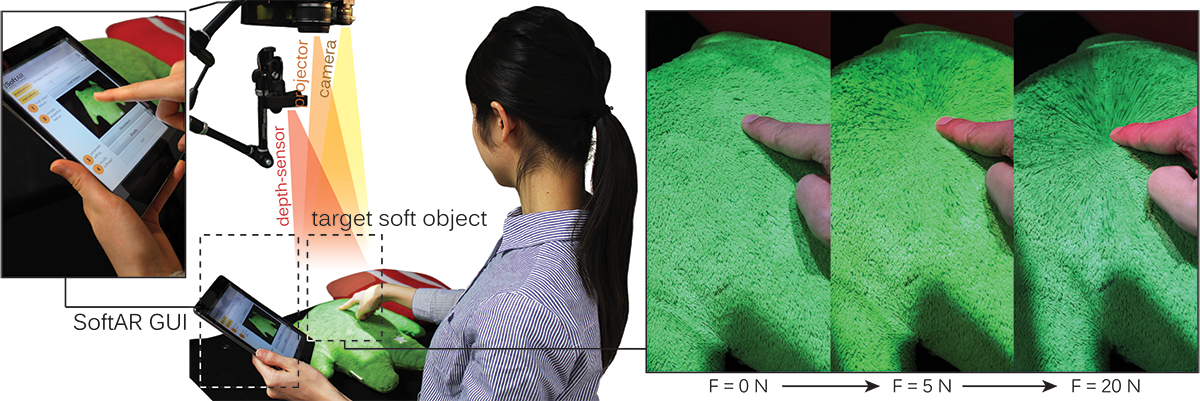
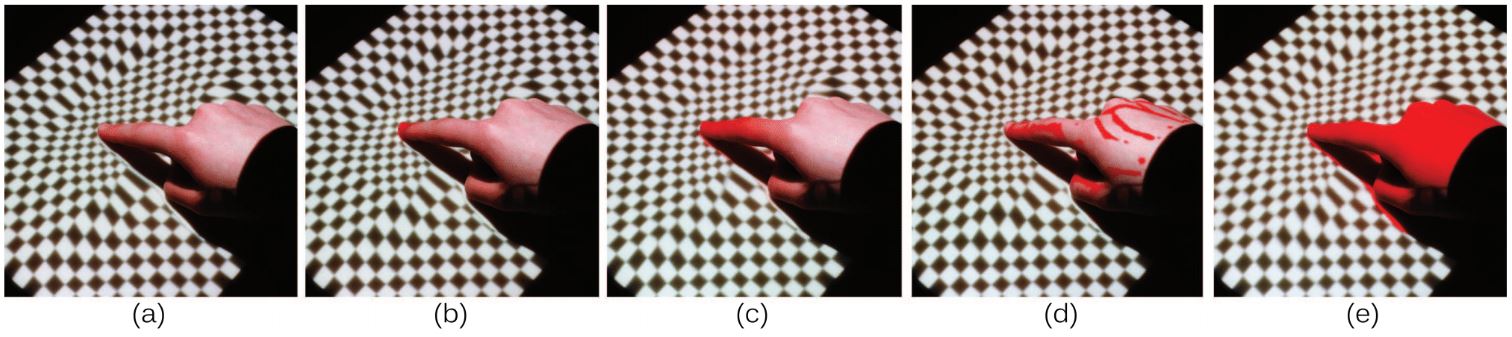
We present SoftAR, a novel spatial augmented reality (AR) technique based on a pseudo-haptics mechanism that visually manipulates the sense of softness perceived by a user pushing a soft physical object. Considering the limitations of projection-based approaches that change only the surface appearance of a physical object, we propose two projection visual effects, i.e., surface deformation effect (SDE) and body appearance effect (BAE), on the basis of the observations of humans pushing physical objects (Figure 1). The SDE visualizes a two-dimensional deformation of the object surface with a controlled softness parameter, and BAE changes the color of the pushing hand. Through psychophysical experiments, we confirm that the SDE can manipulate softness perception such that the participant perceives significantly greater softness than the actual softness. Furthermore, fBAE, in which BAE is applied only for the finger area, significantly enhances manipulation of the perception of softness. We create a computational model that estimates perceived softness when SDE+fBAE is applied. We construct a prototype SoftAR system in which two application frameworks are implemented. The softness adjustment allows a user to adjust the softness parameter of a physical object, and the softness transfer allows the user to replace the softness with that of another object.
The sense of softness is an essentialhapticcue that significantly af-fects the impressions of soft objects as well as the assessment of theirmaterial qualities. Softness properties should be designed carefullyfor various soft products, particularly those that must be comfortablefor users, such as furniture (e.g., cushions and sofas), clothes (e.g.,hats and shoes), and plush toys (e.g., dolls). For soft products that useimitation materials (e.g., artificial leather and fake fur), manufacturershave pursued not only textures but also softness of products that aresimilar to those of real materials to achieve high-quality products atlow prices. The food industry also attempts to optimize the softness offood products, which can significantly affect the taste of the products.In social human-robot interaction, the softness of a robot’s skin playsan important role because it determines the close physical interactionbetween robots and humans, and the impressions of the robot.
Related Publications
Parinya Punpongsanon, Daisuke Iwai, and Kosuke Sato. SoftAR: Visually Manipulating Haptic Softness Perception in Spatial Augmented Reality. IEEE Transactions on Visualization and Computer Graphics (Proceedings of IEEE International Symposium on Mixed and Augmented Reality 2015), Vol. 21, No. 11, pp. 1279-1288. November 2015. Best Student Research Award
Parinya Punpongsanon, Daisuke Iwai, and Kosuke Sato. A Preliminary Study on Altering Surface Softness Perception using Augmented Color and Deformation. In Proceedings of IEEE International Symposium on Mixed and Augmented Reality (ISMAR) 2014, pp. 301-302. Munich, Germany, September 2014.